Determining Which Alignment to Use for the Given Driver and Box Parameters
The Overall Procedure
The first step of the algorithm is to determine the appropriate alignment to use based on the values of QT and QL provided by the user. This article is concerned only with the Chebyshev, Butterworth, quasi-Butterworth and sub-Chebyshev alignments. The determination of which alignment to use is based on a parameter denoted by QTB, which is the required value of QT for a given QL that yields a Butterworth alignment. For values of QT greater than QTB, a Chebyshev alignment is chosen. For conventional non-assisted systems using drivers with QT values less than QTB, a quasi-Butterworth or sub-Chebyshev alignment may be chosen depending on user preference. For assisted systems using drivers with QT values less than QTB, a sub-Chebyshev alignment is chosen for reasons previously mentioned.
Equation (20) of Small [1] gives the transfer function G(s) as:
| (1) |
It should be emphasized that for assisted alignments with n > 4, G(s) above is not the overall nth-order system transfer function, but any factor of it having a quartic denominator with real coefficients and a numerator specifying four zeros at the origin. G(s) only represents the transfer function of the loudspeaker system itself without external filters included.
Finding the Required Driver Q for a Butterworth Alignment
The established filter theory in e.g. Weinberg [9] yields many useful relationships for Butterworth filters by studying a normalized low-pass prototype filter of order n having a -3dB frequency of 1 rad/sec. The nth-order denominator of the transfer function of such a normalized low-pass filter is referred to as a Butterworth polynomial of order n. To help take the best advantage of the techniques of filter theory, we'll perform a low-pass to high-pass transformation on equation (1) above, and normalize it to a new time constant denoted by T1. This will cause the denormalized high-pass filter of (1) to be transformed to a normalized low-pass filter. We'll call the resulting normalized low-pass function GLP(s). One goal is to start with some known properties of Butterworth polynomials of order n, where n ≥ 4, then deduce some properties that apply to any quartic factor of the nth-order Butterworth polynomials as is found in the denominator of GLP(s) below. Specifically, we seek constraints that apply to a1, a2, a3 and T1. The transformation required to obtain GLP(s) from G(s) takes each instance of sT0 in G(s) above and replaces it with 1/(sT1). Performing the transformation gives:
| (2) |
Note that this reverses the order of the coefficients in the denominator such that the value of the subscript index of each denominator coefficient matches the power to which the frequency variable it multiplies is raised. It should be reiterated that GLP(s) is the normalized low-pass prototype for the high-pass transfer function of the loudspeaker system itself without any external electrical filters.
Weinberg [9] shows that the poles of the normalized Butterworth transfer function of order n all lie on a unit circle in the s-plane and are separated from each other by an angle π/n. Odd-order normalized Butterworth low-pass filters have a single real-valued pole at s = -1 with all remaining poles complex, while all poles are complex for even n. Figure 2 below illustrates an example for both even and odd n in which only the two complex poles s1 and s2 closest to the negative real axis in the second quadrant are shown.
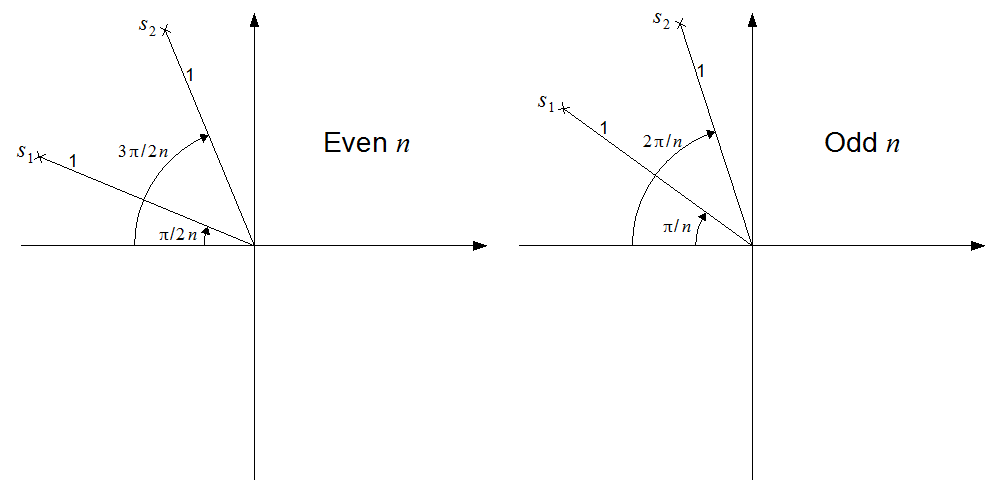
For the odd-order assisted Butterworth alignment case, the one real pole must be assigned to the external filter. Since all other poles are complex, it's readily shown that assigning the one real pole to the loudspeaker transfer function would result in the transfer functions of the loudspeaker and external electrical filter having complex coefficients due to a complex conjugate pole pair being split between the loudspeaker and external filter. For both the even- and odd-order Butterworth cases, the poles of the loudspeaker transfer function can be any two pairs of complex conjugate poles chosen from the collection of n total poles. Let's examine the properties of the resulting quartic factor of the normalized nth-order Butterworth polynomial by first looking at its individual quadratic factors.
There is no loss of generality in dealing only with those poles in the second quadrant per Figure 2 above. The remaining poles are their conjugates in the third quadrant. Let the two second-quadrant poles to be assigned to the low-pass prototype of the loudspeaker transfer function be denoted by sa and sb. Although s1 and s2 of Figure 2 are defined to be the two second-quadrant complex poles closest to the negative real axis, sa and sb can be any two second-quadrant complex poles of a normalized low-pass Butterworth transfer function of order n. Then the denominator D(s) of the fourth-order normalized low-pass prototype GLP(s) can be written in factored form as:
| (3) |
where "star" denotes the complex conjugate. Let's look at the properties of the first quadratic factor of D(s) in equation (3) above.
| (4) |
The constant term is the product of sa and its conjugate. That product is just |sa|2. Since all the poles of a normalized Butterworth low-pass transfer function are on the unit circle, the constant term must be unity for each of the quadratic factors of D(s). The linear term is the sum of sa and its conjugate, which is twice the real part of sa. Define the Butterworth pole angles θa and θb as the angles of the poles sa and sb respectively, relative to the negative real axis in a fashion similar to Figure 2. Using Figure 2 as a guide with the appropriate substitutions, the coefficient of s on the right side of equation (4) above is:
| (5) |
since the magnitude of sa is 1. Therefore the quadratic polynomial Da(s) involving sa is:
| (6) |
Likewise, the quadratic polynomial Db(s) having sb and its conjugate as roots is:
| (7) |
Then Da(s) and Db(s) are multiplied together to obtain the quartic polynomial D(s), the denominator of the normalized low-pass prototype GLP(s). To simplify the result, we let
| (8) |
and
| (9) |
so that
| (10) |
Performing the multiplication gives
| (11) |
Since D(s) in (11) is the denominator of GLP(s) in (2), we can see that
| (12) |
and
| (13) |
Also, by inspection of (11), T1 = 1 in (2).
This demonstrates that every quartic polynomial factor of a normalized Butterworth polynomial of order n has a1 = a3, provided the coefficients of the quartic polynomial are real and n ≥ 4. This is a direct consequence of the roots of the normalized Butterworth polynomials being on the unit circle.
In Small ([1] equations (21) - (24)), the coefficients of the system transfer function G(s) (equation (1) above) are given in terms of the driver and box parameters by
| (14) | |
| (15) | |
| (16) | |
| (17) |
The equality of a1 and a3 for all quartic factors of the Butterworth polynomials allows the direct computation of QTB, the required value of QT that yields a Butterworth alignment, for any system order n, regardless of how the system poles are partitioned between the loudspeaker and external filter. Setting a1 of (15) equal to a3 of (17) shows that h = 1, which is just the well-known relationship that fB = fS for the Butterworth alignment. With that known, it's simple to solve for QTB. Using equation (17) with h = 1 and QT = QTB,
| (18) |
Substituting (12) into (18), we get
| (19) |
For the important special case of ordinary unassisted alignments with n = 4, let the value of QTB be denoted by QTB4. Inspection of the left side of Figure 2 along with equation (19) shows that:
| (20) |
Another special case to be considered is the assisted alignment with n = 5. Let the value of QTB in this case be denoted by QTB5. Inspection of the right side of Figure 2 along with equation (19) shows that:
| (21) |
For assisted alignments where n is 6 or greater, the situation becomes more complicated, since it's necessary to choose how the poles are partitioned between the loudspeaker and external filter. The concept of alignment class from Thiele [5] can be used for e.g. n = 6. In this case, there are three different ways of partitioning the poles corresponding to Thiele's classes I, II and III. This results in three different possible combinations of θa and θb values, which in turn gives three different possible values of QTB for n = 6 as determined by (19). The details of how to handle this will be described in later sections.
Obtaining a Single Nonlinear Equation to Solve
The general solution strategy that's common to all the alignments will now be described. Equations (17) and (15) respectively can be written as:
| (22) | |
| (23) |
Mutliplying (22) by QL and (23) by QT and subtracting gives:
| (24) |
As long as h is never zero, (23) can be rewritten as:
| (25) |
Substituting (24) into (25) gives:
| (26) |
Since QT and QL are known, if a1 and a3 could each be expressed in terms of some common variable, then equation (26) would have only one unknown, which could be found with a simple root-finding algorithm. If in addition a2 could also be expressed in terms of that same variable, then a1, a2 and a3 could all be found, thus establishing the alignment. The specific method of expressing a1, a2 and a3 in terms of a common variable depends on the alignment type and will be discussed in the following sections.
Finding the Remaining Design Parameters
Assuming a1, a2 and a3 have been found by the method above, (24) shows that we can solve for h as follows:
| (27) |
Solving (16) for α, we get:
| (28) |
The time constant T0 of (1) can be found from (14) and (24).
The Low-Pass to High-Pass Transformation and Frequency Scaling
The design technique to be developed herein uses the classic filter theory, in which one obtains the desired transfer function by starting with a normalized prototype low-pass filter and performing a frequency transformation. In this case, the desired transfer function is a denormalized high-pass filter, and a low-pass to high-pass transformation incorporating frequency scaling is used to obtain it from the normalized low-pass prototype. Since one goal is to generalize the synthesis procedure to assisted alignments of any order n, we begin with a normalized nth-order prototype low-pass transfer function for the overall system including external electrical filters. Let this transfer function be called HLP(s). We can express HLP(s) as follows:
| (29) |
The procedure requires that a closed-form expression for the poles of HLP(s) be available, which allows for the denominator to be factored at will, in our case into the product of a quartic polynomial and another polynomial having degree n - 4 when n > 4. The quartic polynomial is then associated with the low-pass prototype of the transfer function of the loudspeaker itself without external filters. This quartic low-pass prototype has already been identified as GLP(s) and can always be put into the form of (2). Since G(s) of (1) is the actual physical transfer function of the loudspeaker portion of the system, we wish to find the frequency transformation by which one obtains G(s) from GLP(s). Then this transformation is performed on the entire low-pass prototype HLP(s) of (29), or separately, first on its quartic factor GLP(s) that forms the low-pass prototype of the loudspeaker transfer function, then on the remaining factors that form the low-pass prototypes for the external filters. It can be seen that replacing sT1 in GLP(s) of (2) with 1 / (sT0) gives G(s) of (1). This transformation is sometimes written:
| (30) |
This representation can cause confusion when the quantity T1 does not explicitly appear in the low-pass prototype. A related problem occurs when trying to compute the -3dB frequency of the denormalized high-pass function when one has a closed-form expression for the -3dB frequency of the the normalized low-pass prototype. The solution of that problem involves finding the correspondence between the frequency variable of the normalized low-pass and that of the denormalized high-pass. To help with both of these problems, it's easier to write the normalized low-pass as a function of the dummy variable S and write the transformation as follows:
| (31) |
or
| (32) |
By setting S = jΩ and s = jω, one can find explicit formulas for the frequency mapping. In doing so, one finds the relationship between denormalized radian frequency ω of the high-pass and normalized radian frequency Ω of the low-pass contains a minus sign. However, since we're only interested in the magnitude of the transfer function when finding the -3dB frequency, the minus sign can be discarded since the magnitude is an even function of frequency. Computing the mapping gives the following result.
| (33) |
Thus if one has a closed-form expression for the normalized -3dB radian frequency Ω3 of the low-pass prototype, one can find the overall system -3dB radian frequency ω3 by using (33).